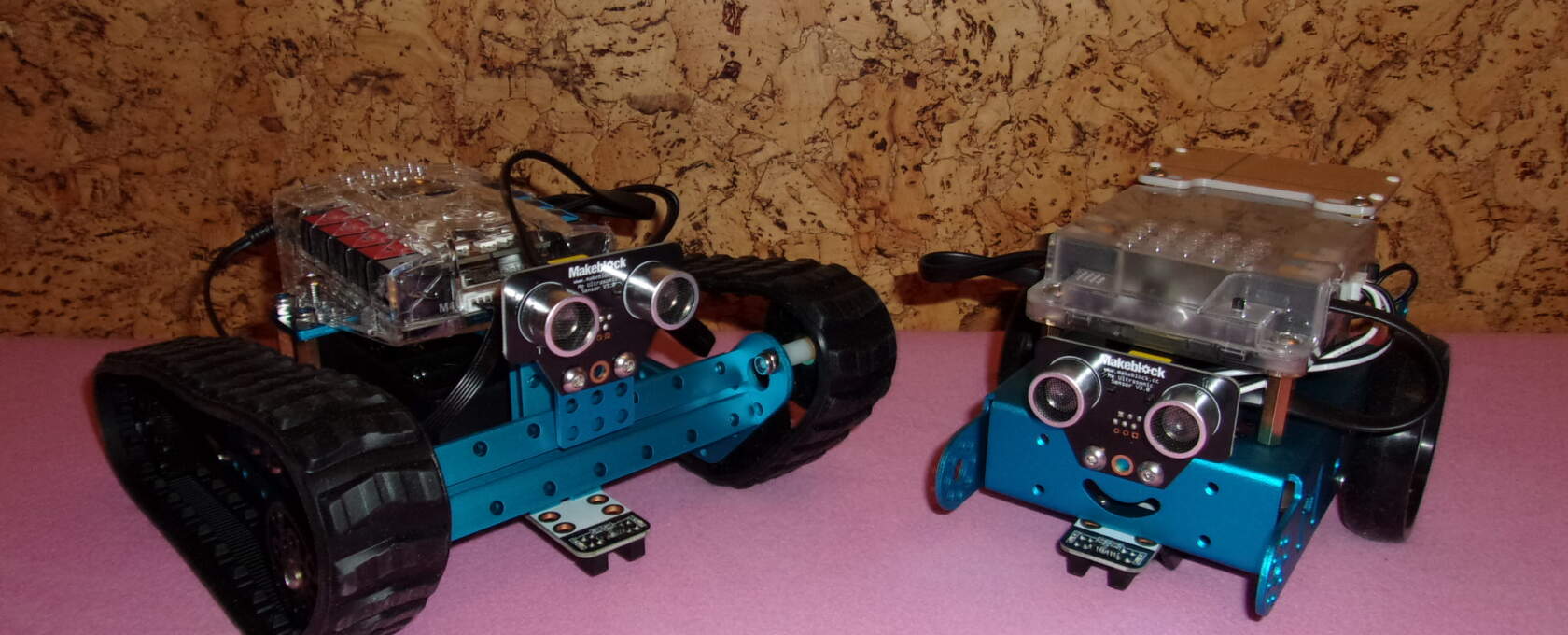
Ovládanie kolies (volantom) a ovládanie diferenciálnej rýchlosti sú dva bežné spôsoby ovládania automobilu.
Ovládač riadenia kolies využíva uhly vychýlenia kolies na zmenu smeru jazdy:
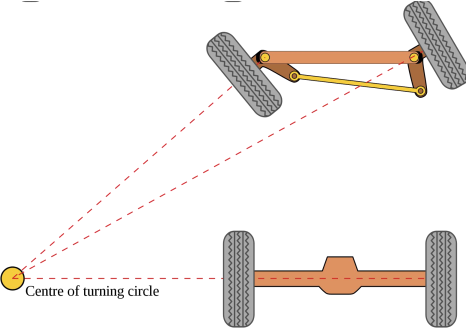
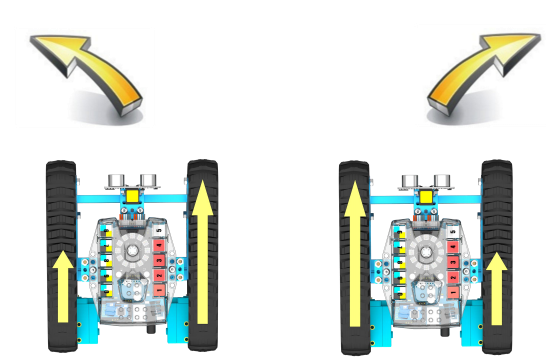
Ovládač rýchlosti používa rozdiel rýchlosti oboch kolies na zmenu smeru jazdy. Ak je rýchlosť pravého kolesa vyššia ako ľavého --- otočí sa doľava. Ak je rýchlosť ľavého kolesa väčšia ako pravého, otočí sa doprava.
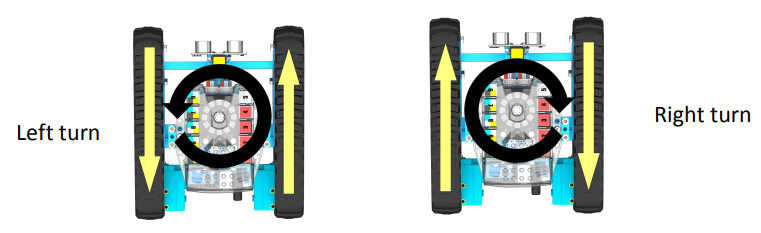
Otočenie môžeme dosiahnuť aj opačným chodom motorov. Ak sa ľavé koleso točí dozadu a pravé dopredu, otáča sa celý robot vľavo. Naopak, ak sa ľavé koleso točí dopredu a pravé dozadu, otáča sa celý robot vpravo.
Enkodérový motor mBot Rangera je kombináciou motora, prevodovky a enkódera. Prevodovka prostredníctvom rôznych súprav prevodov premieňa vysoký krútiaci moment na nízky krútiaci moment. Celkový prevodový pomer prevodovky Ranger Encoder Motor je 3: 140, čo znamená, že keď sa rotor (koleso) trikrát otočí, motor sa otočí 140krát a pre každú rotáciu motora musel vydať enkodér štyri impulzy.
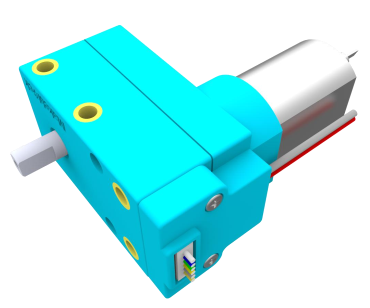
Takže: Na 140 otáčok motora vydá enkóder 140x4 implulzy, to je 560 impulzov. Kolesá sa otočia 3-krát, čo je 3x360 stupňov, čiže 1080 stupňov. Keď vydelíme 1080 stupňov / 560 impulzov, zistíme, že každý impulz otočí koleso o 1,928 stupňa.
Prostredníctvom enkodéra môžeme ovládať motor tak, aby sa otáčal konkrétnym smerom. Ranger má dva enkodérové motory. Motor ľavého enkódera je pripojený do slotu 2 a motor pravého enkódera je pripojený do slotu1.
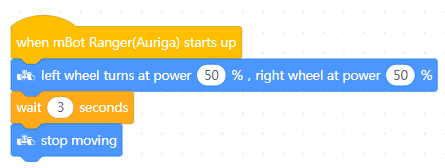
Ak obe kolesá roztočíme týmto programom rovnakým smerom a rovnakou rýchlosťou, robot pôjde rovno:
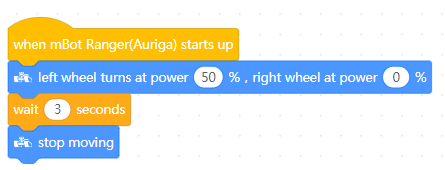
Ak roztočíme len ľavé koleso a pravé necháme v pokoji, robot sa bude točiť doprava:
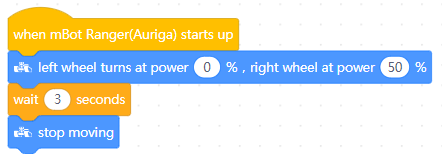
Ak roztočíme len pravé koleso a ľavé necháme v pokoji, robot sa bude točiť doľava:
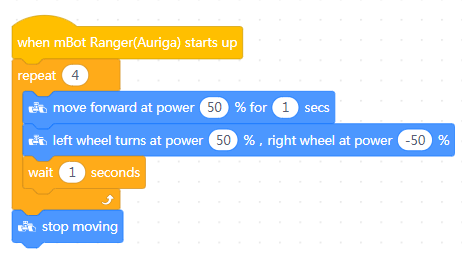
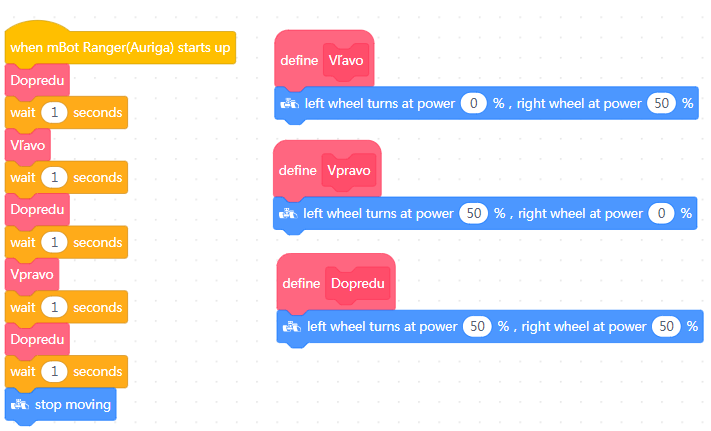
Ak skombinujeme tieto naše poznatky, môžeme vyskúšať takýto program (využíjeme v ňom bloky):
Program môžeme vylepšiť tak, že blokom pridáme parametre:
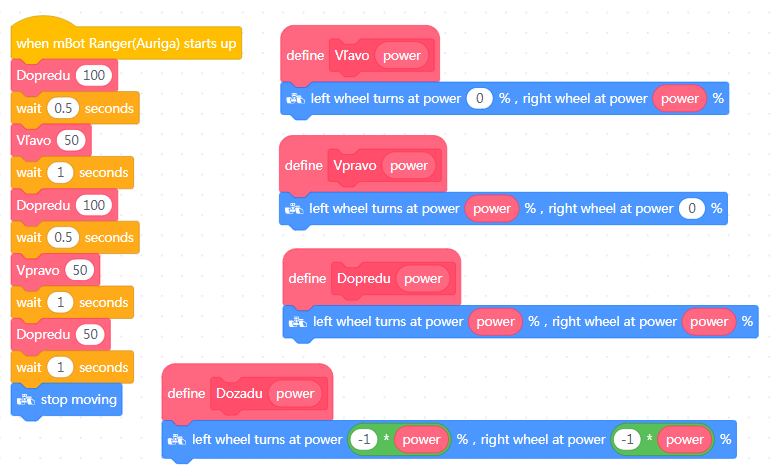
Na záver skúsime naprogramovať jazdu mBot Rangera po dráhe v tvare štvorca.
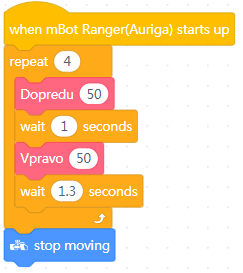
Iná možnosť: