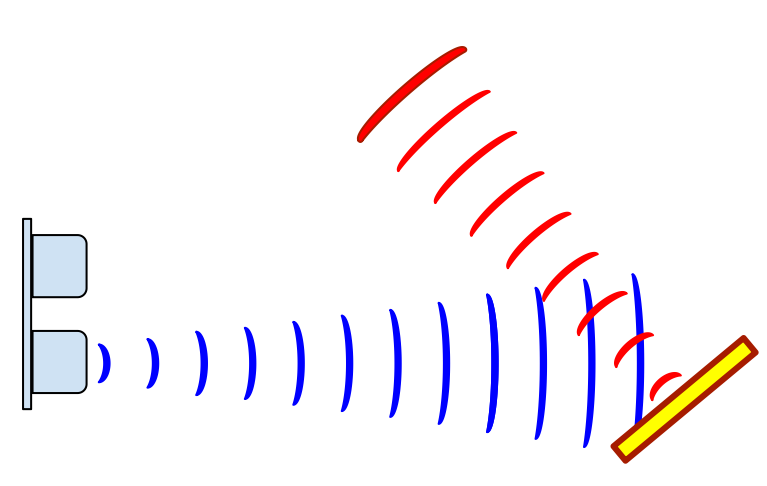
Ultrazvukový senzor, ktorý používa mBot Ranger, sa skladá z ultrazvukového vysielača, ultrazvukového prijímača a riadiaceho obvodu.
Keď ultrazvukový vysielač dostane príkaz, začne vysielať ultrazvukové vlny dopredu. Tieto vlny narazia na prekážku, odrazia sa a odrazené zvukové vlny prijme ultrazvukový prijímač. Auriga potom vypočíta vzdialenosť prekážky z času, ktorý uplynul medzi vyslaním a prijatím signálu.
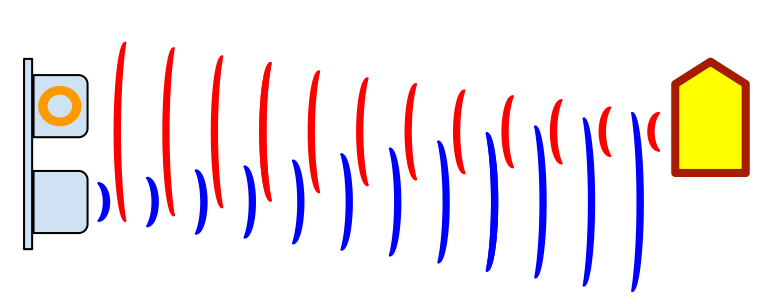
Ak je prekážka šikmá a odrazené vlny prijímač nezachytí, vypočítaná hodnota bude 0:
Činnosť ultrazvukového senzoru vyskúšame pomocou jednoduchého programu v režime Live, v ktorom použijeme premennú us_senzor:
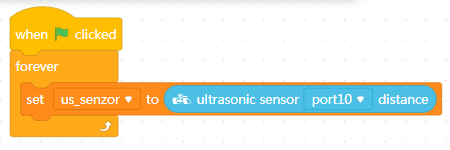
Po spustení programu dajte pred robota prekážku a pohybujte ňou. Pozorujte, ako sa mení hodnota premennej us_senzor podľa vzdialenosti prekážky od robota.
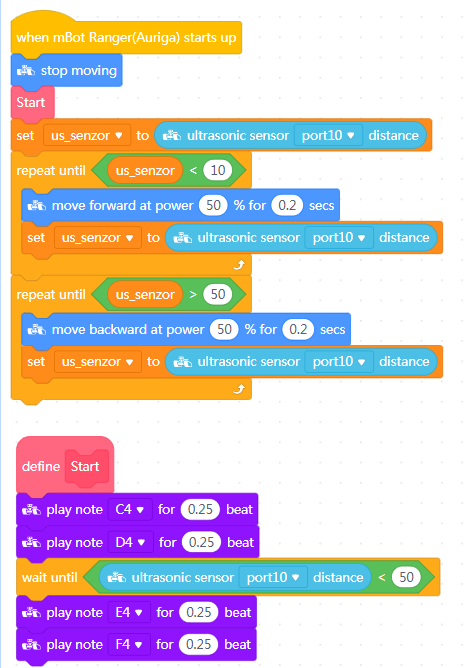
Na vyskúšanie nasledujúceho programu postavte pred mBot Rangera prekážku vo vzdialenosti väčšej ako 50 cm. Potom spustite program (najprv ho nahrajte do mBota, zapnite motory a stlačte tlačidlo Reset). Robot zahrá dva tóny. Posúvajte prekážku bližšie k robotovi, ak bude vo vzdialenosti menšej ako 50 cm, robot zahrá ďalšie dva tóny pohne sa vpred. Vo vzdialenosti 10 cm pred prekážkou začne cúvať a keď dosiahne vzdialenosť väčšiu ako 50 cm, tak sa zastaví.
Video: https://youtu.be/MOXxo1rifrQ