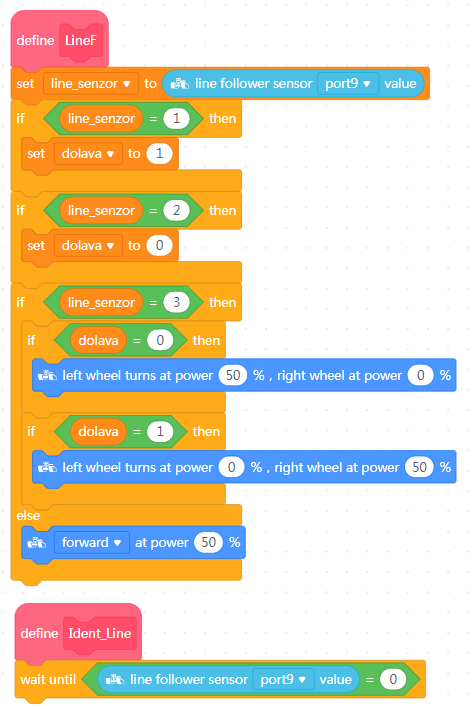
So senzorom na sledovanie čiary sme už pokusy robili. Ak chceme, aby robot chodil po čiare rýchlejšie, musíme vymyslieť trošku zložitejšiu logiku jeho rozhodovania. Do premennej line_senzor si uložíme aktuálnu hodnotu senzora čiary a do premennej dolava si uložíme hodnotu 0 alebo 1 podľa nasledujúcej tabuľky:
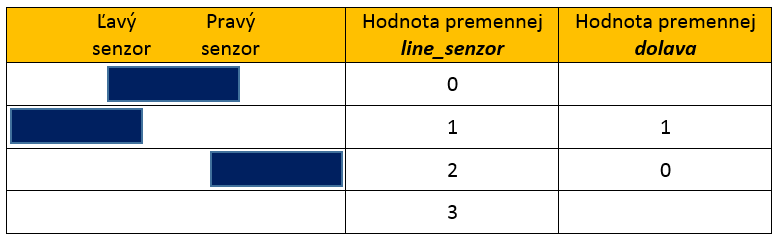
Ak nastane situácia v druhom riadku tabuľky: robot sa odklonil z čiary doprava, čiže ho treba skorigovať doľava.
Ak nastane situácia v treťom riadku tabuľky: robot sa odklonil z čiary doľava, čiže ho treba skorigovať doprava.
Program v režime Upload teda bude vyzerať takto:
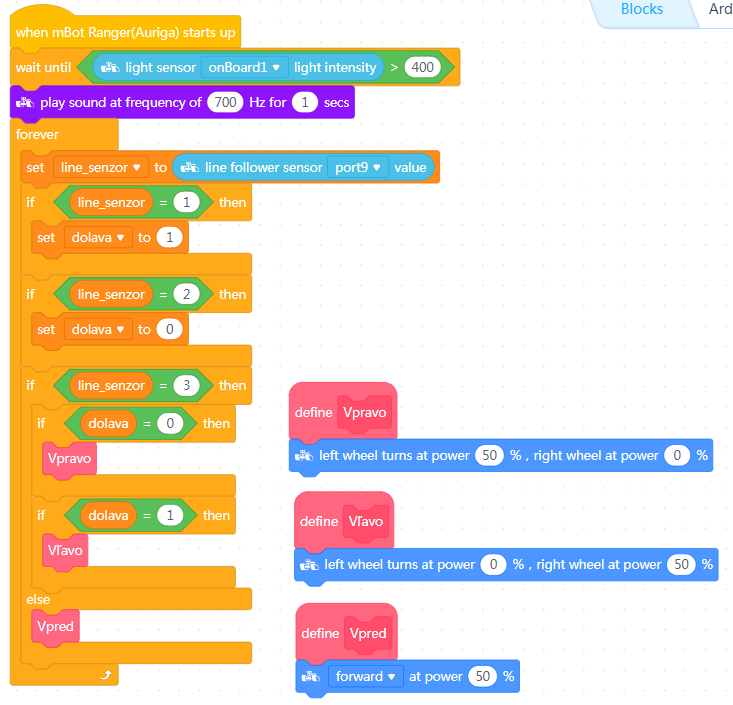
Robot sa začne pohybovať až potom, ako zasvietite na jeho ľavý svetelný senzor baterkou.
Vylepšíme program tak, aby robot zastavil, ak na dráhe bude prekážka.
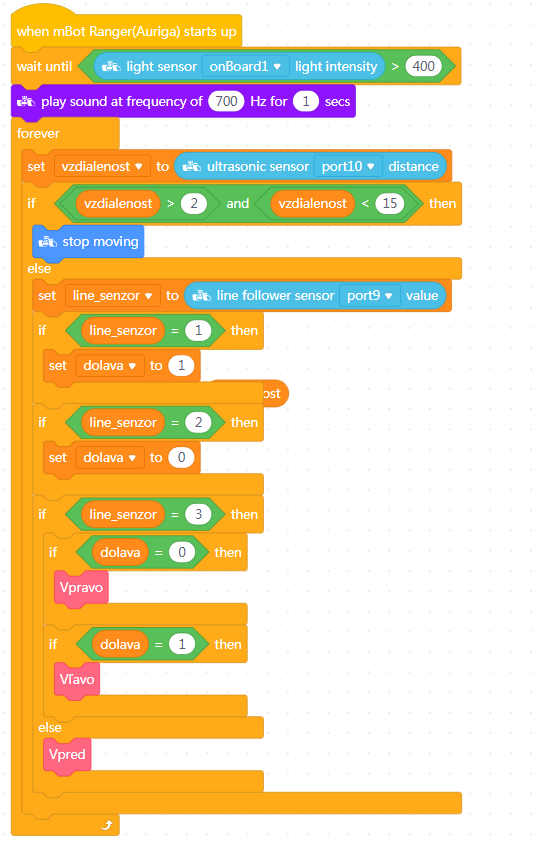
Ako bude fungovať tento program, ak testovanie ultrazvukového senzora prehodíme na koniec programu?

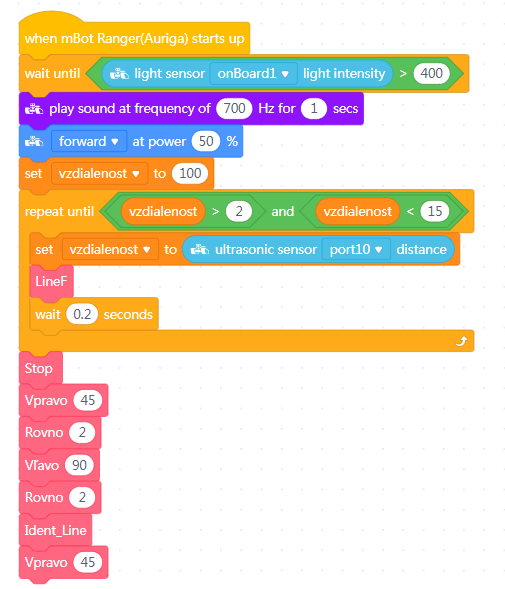
Na záver trochu komplikovanejší program:
video:https://youtu.be/_GJlvcILrT0