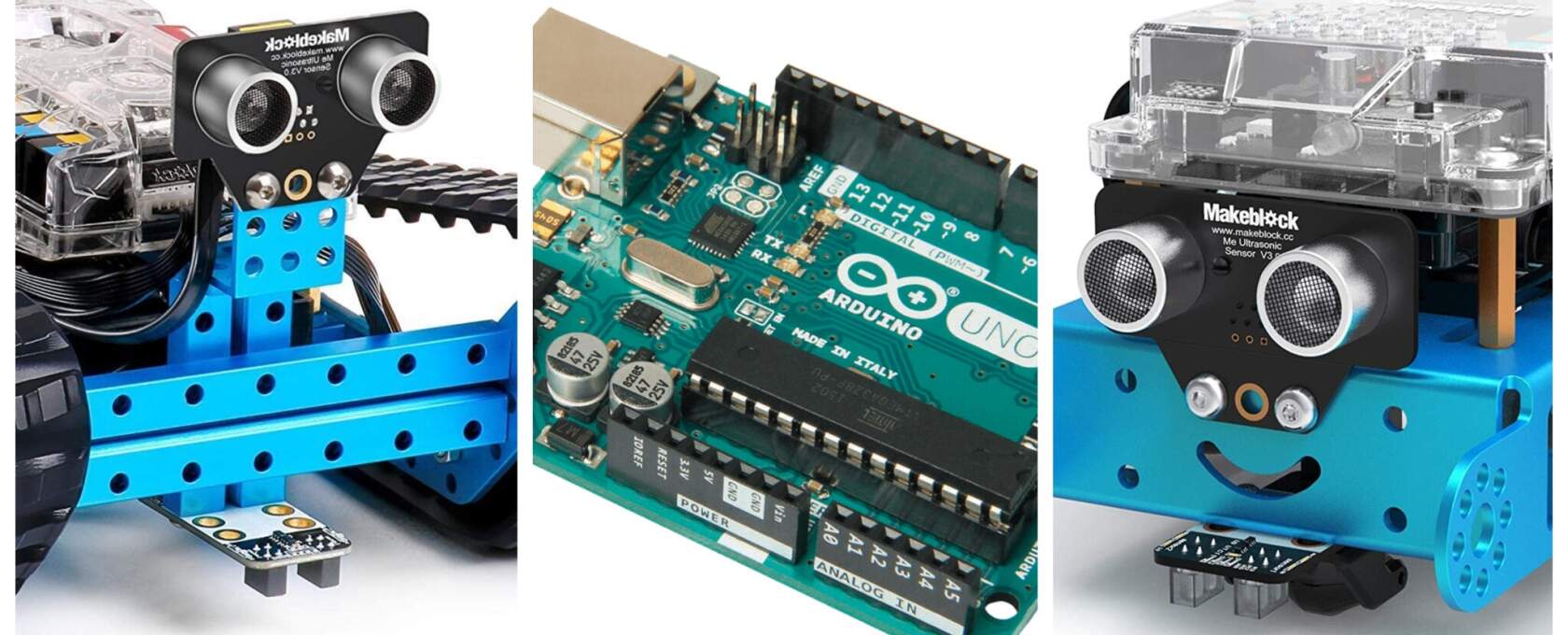
V tomto programe využijeme snímač sledovania čiary na signalizáciu zdvihnutia robota zo svetlej podložky. Snímač sledovania čiary sa nachádza pod robotom:

Zopakujme jeho princíp: snímač sa skladá z 2 senzorov a každý tento senzor obsahuje infračervený vysielač a infračervený prijímač. Infračervený vysielač neustále emituje infračervené svetlo do podložky pod robotom. Vyslaný infračervený lúč sa odrazí od podložky a tento odrazený lúč zachytáva infračervený prijímač.
Ak je sa lúč odrazil od bielej alebo svetlej podložky, prijímač dáva hodnotu 1. Modrá LED na obrátenej strane senzora svieti.
Ak je lúč absorbovaný čiernou alebo tmavou podložkou alebo sa nemá ako odraziť (podložka je príliš ďaleko, viac ako 2 cm), prijímač lúč neprijme a dáva hodnotu 0. Modrá LED na obrátenej strane senzora vtedy nesvieti.
Použitím 2 senzorov môžu teda vzniknúť štyri kombinácie hodnôt 00, 01, 10, 11. Týmto binárnym hodnotám odpovedajú desiatkové hodnoty 0, 1, 2, 3. Nasledujúca tabuľka ukazuje hodnoty snímača čiar podľa toho, nad akou farbou sa nachádzajú ľavý a pravý senzor:

Po napísaní tohto programu položte mBota na svetlý povrch. Ak robota zdvihnete, začne vydávať zvukový signál.

video: https://youtu.be/7niskM_A4Bk