Ultrazvukový senzor namontovaný na mBotovi môžeme využiť na detekciu prekážky:
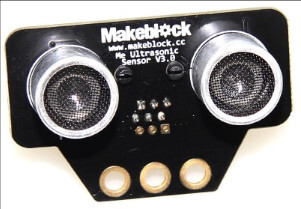
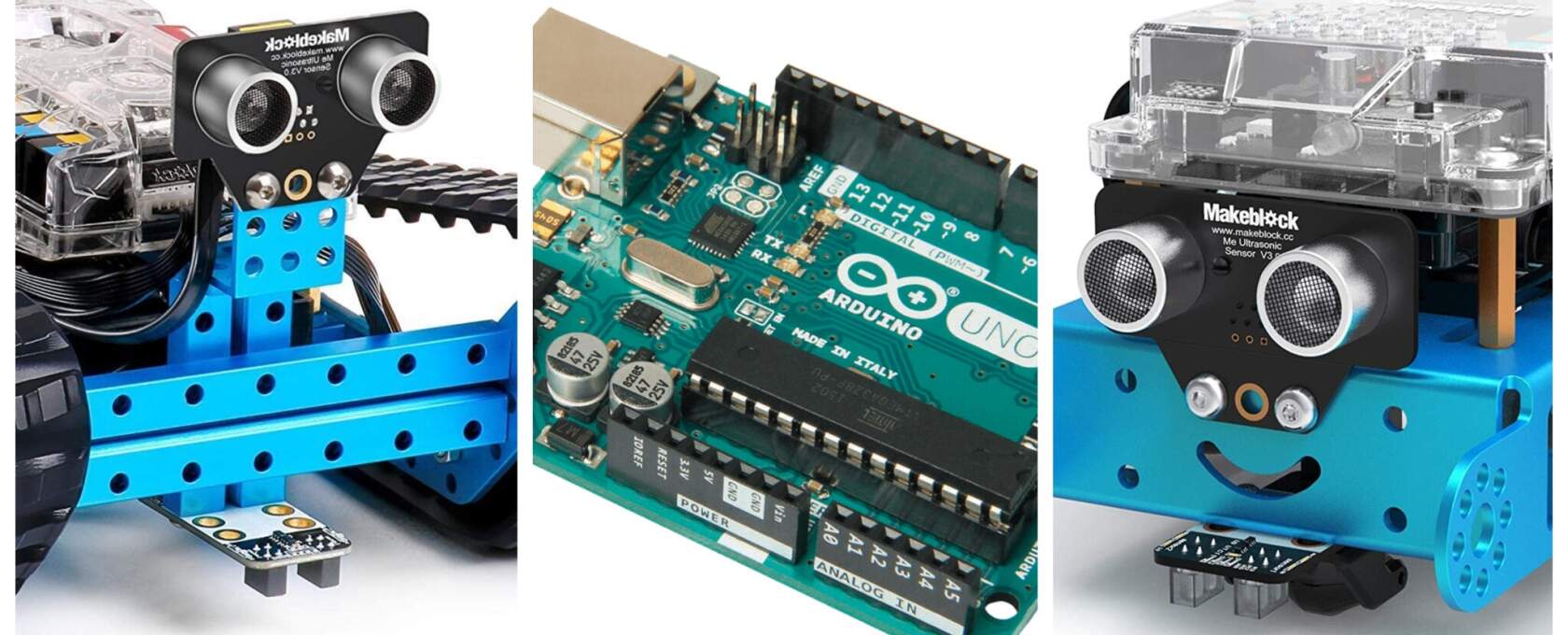
Ultrazvukový snímač má dva senzory, jeden funguje ako vysielač, druhý ako prijímač. Vysielač (transmitter) vyšle zvukovú vlnu, táto sa odrazí od prekážky (objektu) a odrazenú vlnu prijme prijímač (receiver).

Z času, ktorý uplynul medzi vyslaním a prijatím zvukovej vlny sa vypočíta vzdialenosť podľa vzorca:
vzdialenosť = rýchlosť zvuku * čas /2
V tomto programe sa po stlačení tlačidla začne robot pohybovať vpred. Ak je pred ním bariéra, odbočí doprava; ak nemá pred sebou žiadnu prekážku ide stále vpred. Robot zareaguje na prekážku až vo vzdialenosti menšej alebo rovnej 10 cm.

Ak program nefunguje, skontrolujte si, na ktorom porte máte pripojený ultrazvukový senzor.
video:https://youtu.be/nDAuHJn5NlY
Program môžeme vylepšiť tak, aby si robot vyberal náhodne, či sa otočí doprava a alebo doľava.